แขนกล
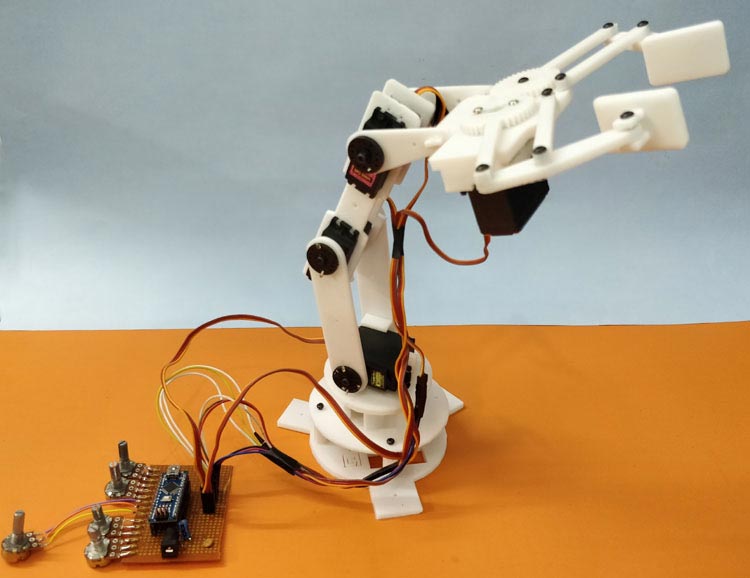
อุปกรณ์
Arduino Nano5 MG-995 Servo Motor5-PotentiometerPerf BoardServo hornsNuts and Screws
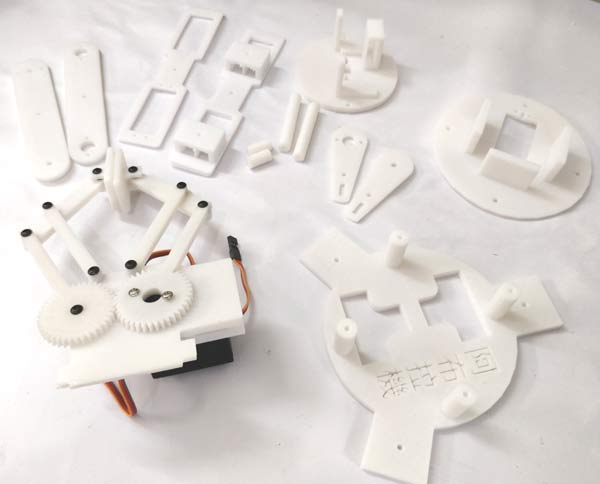
การประกอบ
ต่อวงจร

Code
/*
Robotic ARM with Record and Play option using Arduino
Code by: B. Aswinth Raj
Website: www.circuitdigest.com
Dated: 05-08-2018
*/
#include <Servo.h> //Servo header file
//Declare object for 5 Servo Motors
Servo Servo_0;
Servo Servo_1;
Servo Servo_2;
Servo Servo_3;
Servo Gripper;
//Global Variable Declaration
int S0_pos, S1_pos, S2_pos, S3_pos, G_pos;
int P_S0_pos, P_S1_pos, P_S2_pos, P_S3_pos, P_G_pos;
int C_S0_pos, C_S1_pos, C_S2_pos, C_S3_pos, C_G_pos;
int POT_0,POT_1,POT_2,POT_3,POT_4;
int saved_data[700]; //Array for saving recorded data
int array_index=0;
char incoming = 0;
int action_pos;
int action_servo;
void setup() {
Serial.begin(9600); //Serial Monitor for Debugging
//Declare the pins to which the Servo Motors are connected to
Servo_0.attach(3);
Servo_1.attach(5);
Servo_2.attach(6);
Servo_3.attach(9);
Gripper.attach(10);
//Write the servo motors to initial position
Servo_0.write(70);
Servo_1.write(100);
Servo_2.write(110);
Servo_3.write(10);
Gripper.write(10);
Serial.println("Press 'R' to Record and 'P' to play"); //Instruct the user
}
void Read_POT() //Function to read the Analog value form POT and map it to Servo value
{
POT_0 = analogRead(A0); POT_1 = analogRead(A1); POT_2 = analogRead(A2); POT_3 = analogRead(A3); POT_4 = analogRead(A4); //Read the Analog values form all five POT
S0_pos = map(POT_0,0,1024,10,170); //Map it for 1st Servo (Base motor)
S1_pos = map(POT_1,0,1024,10,170); //Map it for 2nd Servo (Hip motor)
S2_pos = map(POT_2,0,1024,10,170); //Map it for 3rd Servo (Shoulder motor)
S3_pos = map(POT_3,0,1024,10,170); //Map it for 4th Servo (Neck motor)
G_pos = map(POT_4,0,1024,10,170); //Map it for 5th Servo (Gripper motor)
}
void Record() //Function to Record the movements of the Robotic Arm
{
Read_POT(); //Read the POT values for 1st time
//Save it in a variable to compare it later
P_S0_pos = S0_pos;
P_S1_pos = S1_pos;
P_S2_pos = S2_pos;
P_S3_pos = S3_pos;
P_G_pos = G_pos;
Read_POT(); //Read the POT value for 2nd time
if (P_S0_pos == S0_pos) //If 1st and 2nd value are same
{
Servo_0.write(S0_pos); //Control the servo
if (C_S0_pos != S0_pos) //If the POT has been turned
{
saved_data[array_index] = S0_pos + 0; //Save the new position to the array. Zero is added for zeroth motor (for understading purpose)
array_index++; //Increase the array index
}
C_S0_pos = S0_pos; //Saved the previous value to check if the POT has been turned
}
//Similarly repeat for all 5 servo Motors
if (P_S1_pos == S1_pos)
{
Servo_1.write(S1_pos);
if (C_S1_pos != S1_pos)
{
saved_data[array_index] = S1_pos + 1000; //1000 is added for 1st servo motor as differentiator
array_index++;
}
C_S1_pos = S1_pos;
}
if (P_S2_pos == S2_pos)
{
Servo_2.write(S2_pos);
if (C_S2_pos != S2_pos)
{
saved_data[array_index] = S2_pos + 2000; //2000 is added for 2nd servo motor as differentiator
array_index++;
}
C_S2_pos = S2_pos;
}
if (P_S3_pos == S3_pos)
{
Servo_3.write(S3_pos);
if (C_S3_pos != S3_pos)
{
saved_data[array_index] = S3_pos + 3000; //3000 is added for 3rd servo motor as differentiater
array_index++;
}
C_S3_pos = S3_pos;
}
if (P_G_pos == G_pos)
{
Gripper.write(G_pos);
if (C_G_pos != G_pos)
{
saved_data[array_index] = G_pos + 4000; //4000 is added for 4th servo motor as differentiator
array_index++;
}
C_G_pos = G_pos;
}
//Print the value for debugging
Serial.print(S0_pos); Serial.print(" "); Serial.print(S1_pos); Serial.print(" "); Serial.print(S2_pos); Serial.print(" "); Serial.print(S3_pos); Serial.print(" "); Serial.println(G_pos);
Serial.print ("Index = "); Serial.println (array_index);
delay(100);
}
void Play() //Functon to play the recorded movements on the Robotic ARM
{
for (int Play_action=0; Play_action<array_index; Play_action++) //Navigate through every saved element in the array
{
action_servo = saved_data[Play_action] / 1000; //The fist character of the array element is split for knowing the servo number
action_pos = saved_data[Play_action] % 1000; //The last three characters of the array element is split to know the servo postion
switch(action_servo){ //Check which servo motor should be controlled
case 0: //If zeroth motor
Servo_0.write(action_pos);
break;
case 1://If 1st motor
Servo_1.write(action_pos);
break;
case 2://If 2nd motor
Servo_2.write(action_pos);
break;
case 3://If 3rd motor
Servo_3.write(action_pos);
break;
case 4://If 4th motor
Gripper.write(action_pos);
break;
}
delay(50);
}
}
void loop() {
if (Serial.available() > 1) //If something is received from serial monitor
{
incoming = Serial.read();
if (incoming == 'R')
Serial.println("Robotic Arm Recording Started......");
if (incoming == 'P')
Serial.println("Playing Recorded sequence");
}
if (incoming == 'R') //If user has selected Record mode
Record();
if (incoming == 'P') //If user has selected Play Mode
Play();
}
ไม่มีความคิดเห็น:
แสดงความคิดเห็น